|
Junwoo Chang I am an incoming Ph.D. student in Mechanical Engineering at UC Berkeley, where I will be advised by Prof. Negar Mehr. I obtained my M.S. and B.S. at Yonsei University under the guidance of Prof. Jongeun Choi. My research focuses on robotics and reinforcement learning, especially on developing sample-efficient, generalizable, and theoretically grounded methods. |
|
News
|
Publications( * Equal contribution, † Equal advising) |
|
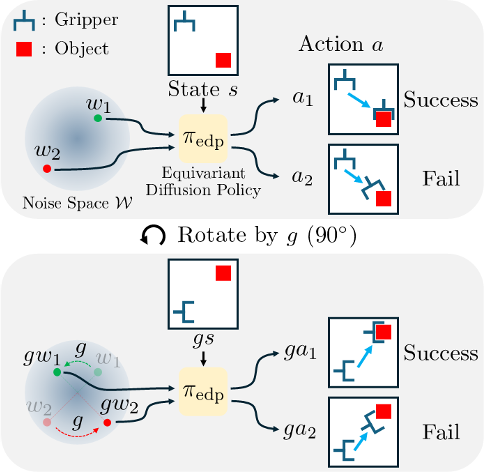
Symmetry-Aware Steering of Equivariant Diffusion Policies: Benefits and Limits
Minwoo Park*,
Junwoo Chang*,
Jongeun Choi,
Roberto Horowitz
IFAC 2026
|
|
Multi-Robot Motion Planning from Vision and Language using Heat-Inspired Diffusion
Jebeom Chae*,
Junwoo Chang*,
Seungho Yeom,
Yujin Kim,
Jongeun Choi
IEEE RA-L, accepted, 2026
|
|
Partially Equivariant Reinforcement Learning in Symmetry-Breaking Environments
Junwoo Chang,
Minwoo Park,
Joohwan Seo,
Roberto Horowitz,
Jongmin Lee†,
Jongeun Choi†
ICLR 2026
|
|
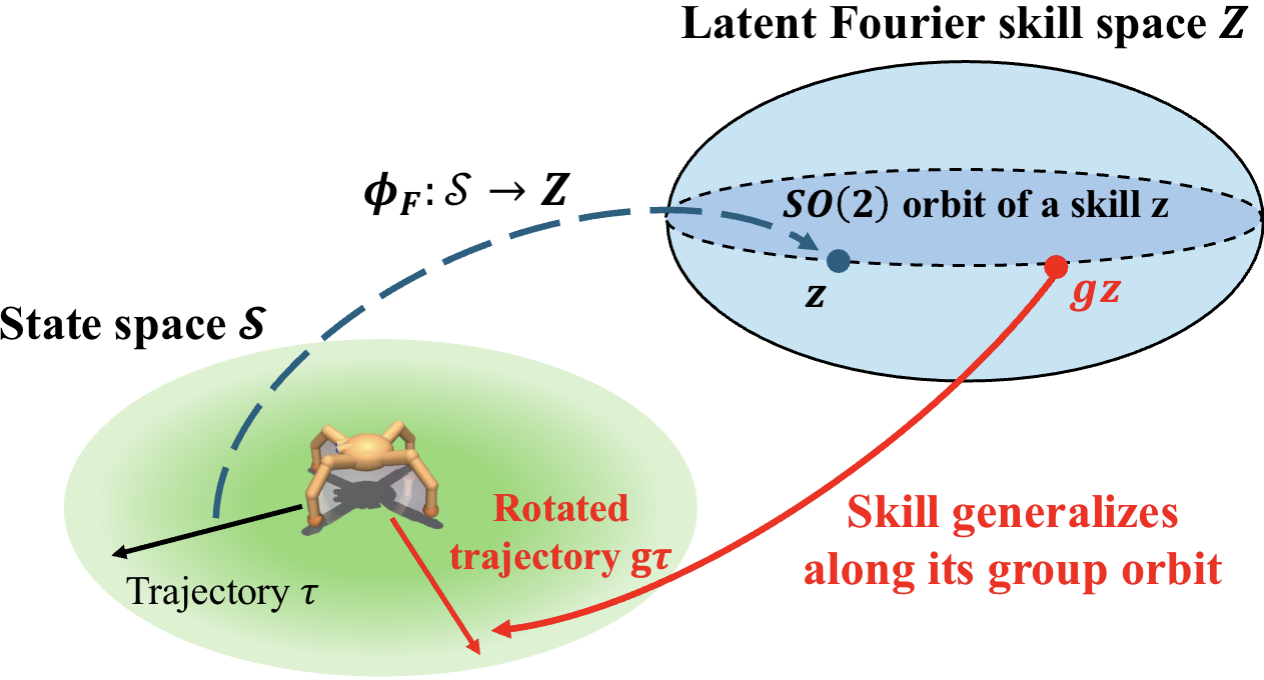
Group-Invariant Unsupervised Skill Discovery: Symmetry-aware Skill Representations for Generalizable Behavior
Junwoo Chang,
Joseph Park,
Roberto Horowitz,
Jongmin Lee†,
Jongeun Choi†
Preprint (Under Review), 2026
|
|
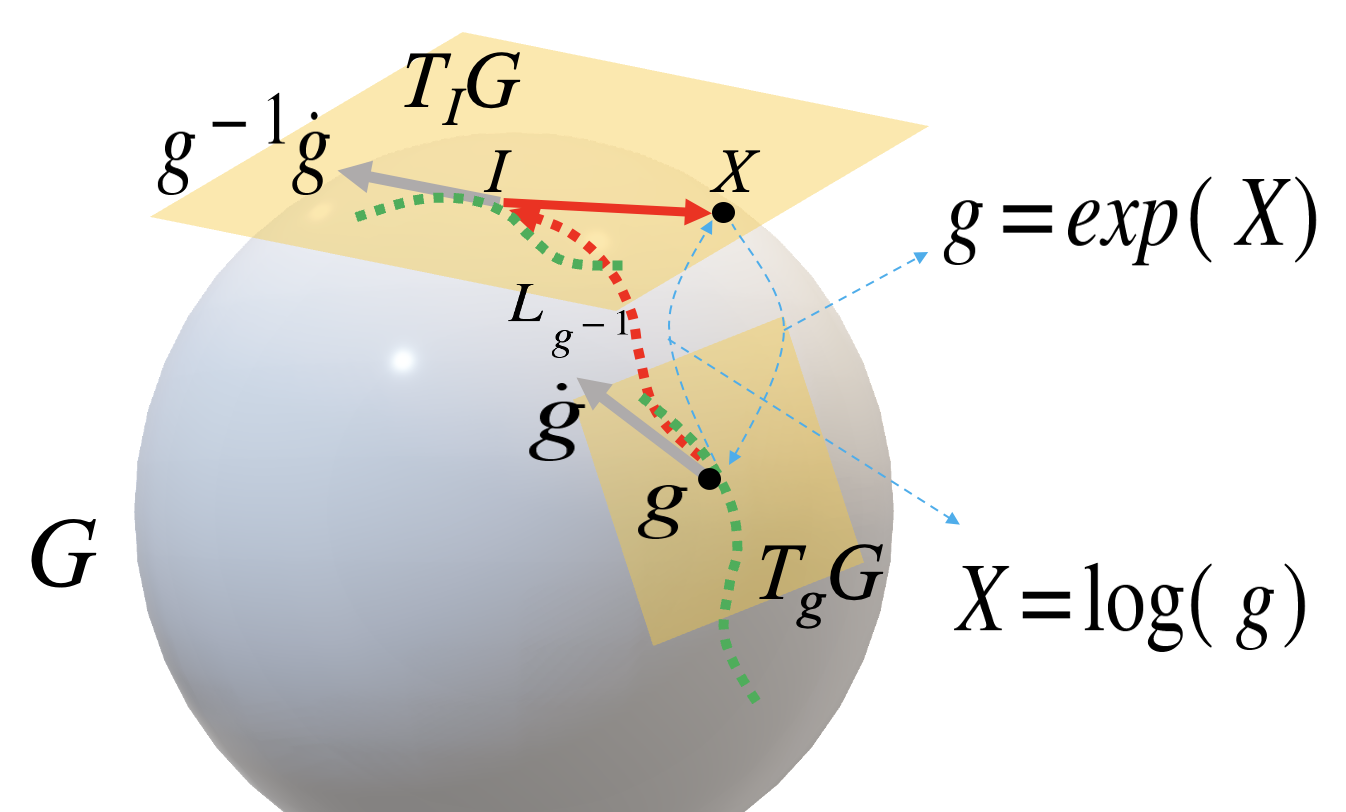
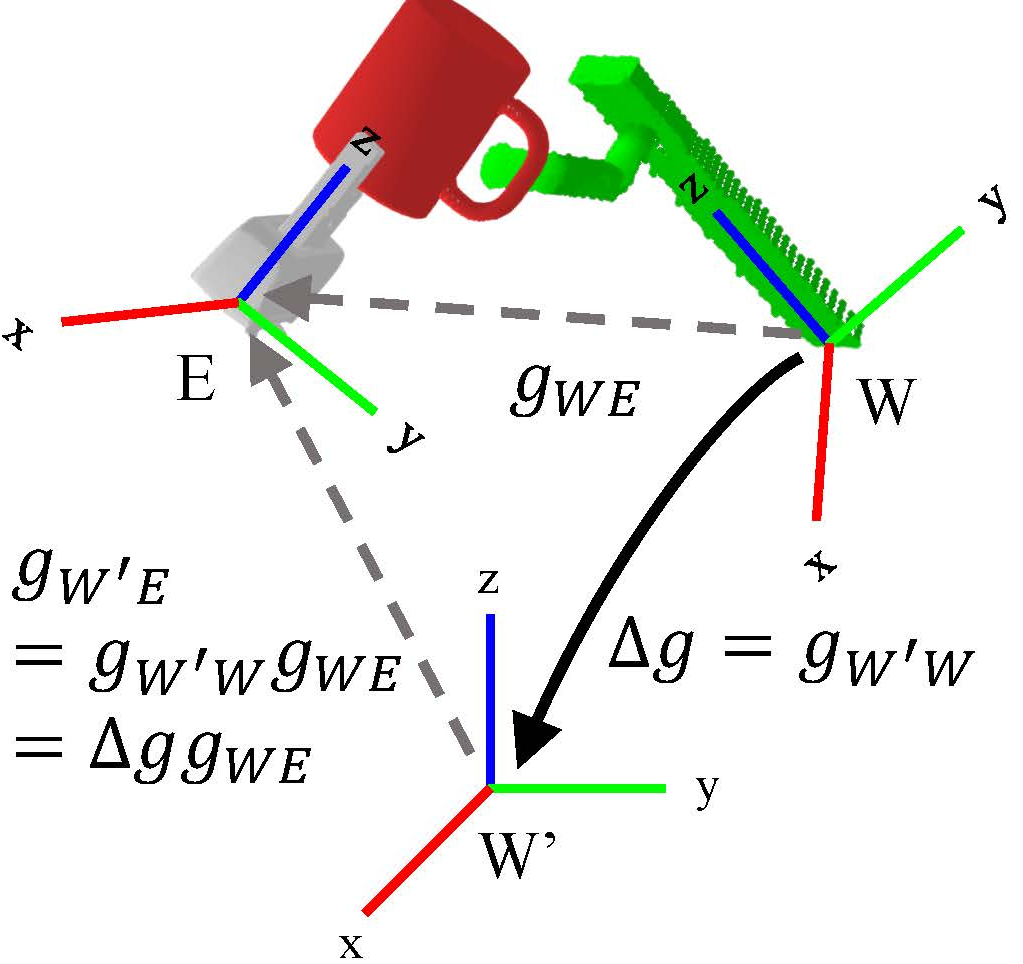
SE(3)-Equivariant Robot Learning and Control: A Tutorial Survey
Joohwan Seo,
Soochul Yoo,
Junwoo Chang,
Hyunseok An,
Hyunwoo Ryu,
Soomi Lee,
Arvind Kruthiventy,
Jongeun Choi,
Roberto Horowitz,
IJCAS 2025
|
|
Diffusion-EDFs: Bi-equivariant Denoising Generative Modeling on SE(3) for Visual Robotic Manipulation
Hyunwoo Ryu,
Jiwoo Kim,
Hyunseok An,
Junwoo Chang,
Joohwan Seo,
Taehan Kim,
Yubin Kim,
Chaewon Hwang,
Jongeun Choi,
Roberto Horowitz,
CVPR 2024 (Highlight)
|
|
Denoising Heat-inspired Diffusion with Insulators for Collision Free Motion Planning
Junwoo Chang*,
Hyunwoo Ryu*,
Jiwoo Kim,
Joohwan Seo,
Nikhil Potu Surya Prakash,
Jongeun Choi,
Roberto Horowitz,
NeurIPS 2023 Workshop on Diffusion Models
|
|
Website source code credit to Jon Barron. |
|